Robot di động tự hành (Autonomous Mobile Robots - AMR) đang làm thay đổi nhanh chóng ngành công nghiệp và tự động hóa. Chúng được trang bị công nghệ tự dẫn đường dùng cảm biến hiện đại và thuật toán không cần sự can thiệp của con người. Từ nhà kho đến bệnh viện, AMR đang hiện đại hóa ngành công nghiệp với các giải pháp hiệu quả, mềm dẻo và thông minh.
Robot AMR là gì?
Đây là loại robot được thiết kế để di chuyển. Nó có thể dịch chuyển trong môi trường làm việc mà không cần có đường đi riêng, cố định hoặc không gian riêng. Nó khác với các robot tự hành AGV yêu cần cần lối đi riêng xác định trước. AMR có thể di chuyển linh hoạt, tự động điều chỉnh hướng đi dựa trên dữ liệu thu được thời gian thực về môi trường xung quanh. Có nghĩa là nó tự động tìm được lối đi khác khi xuất hiện chướng ngại vật.

Robot AMR đang vận chuyển hàng hóa trong nhà kho.
Chức năng chính của robot AMR là dịch chuyển hàng hóa từ nơi này sang nơi khác. Nó có thể là vật nhỏ như linh kiện trong dây chuyền sản xuất hay vật có kích thước lớn hơn như pallete trong kho hàng. Tuy nhiên chức năng của nó vượt xa việc vận chuyển hàng. Một số robot AMR được trang bị cánh tay robot cho phép chúng nhặt thiết bị hoặc kiểm tra chất lượng sản phẩm.
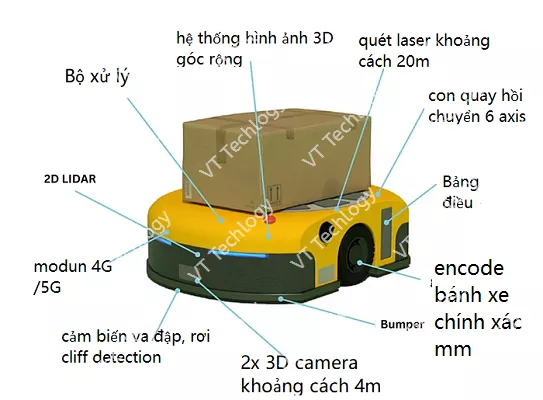
Các bộ phận chính của robot AMR bao gồm: nền tảng di động (mobility platform), cảm biến, bộ điều khiển và nguồn cung cấp. Nền tảng di động có bánh xe giúp robot di chuyển. Các cảm biến bao gồm: camera, Lidar, cảm biên siêu âm ... cung cấp thông tin cho robot về môi trường xung quanh. Bộ điều khiển xử lý thông tin từ cảm biến, gửi lệnh đến động cơ robot để điều khiển dịch chuyển. Cuối cùng là nguồn cung cấp thường là ắc quy xạc lại được cung cấp năng lượng để robot hoạt động.
Trong khi AGV được sử dụng trong công nghiệp nhiều năm thì AMR là bước tiến bộ lớn. AGV chỉ có thể đi theo lối đi cố định, thường xác định bằng dây cáp chôn dưới đất, hay băng từ, điểm đánh dấu trên sàn, điều này làm chúng kém linh hoạt hơn AMR. Ngược lại AMR dùng cảm biến và thuật toán để xác định lối đi. Nó cho phép chúng di chuyển linh hoạt, tránh chướng ngại vật và chọn lối đi tốt nhất. Tính linh hoạt và khả năng thích ứng giúp AMR là công cụ mạnh mẽ cho tự động hóa trong các môi trường khác nhau.
Các công nghệ trong robot AMR
Công nghệ cảm biến
Công nghệ trong robot AMR bao gồm cả phần cứng và phần mềm giúp dẫn đường. Một trong các công nghệ quan trọng nhất là cảm biến. Chúng như các tai và mắt của robot. Chúng thu thập dữ liệu về môi trường xung quanh, sau đó sử dụng dữ liệu này để quyết định nơi và các đi đến. Có nhiều loại cảm biến trong robot, mỗi loại đều có ưu và nhược điểm riêng.
LiDAR (Light Detection and Ranging - Phát hiện và Đo khoảng cách dùng ánh sáng) dùng xung ánh sáng đo khoảng cách đến vật thể. Nó có thể dùng để tạo bản đồ 3D môi trường, giúp robot di chuyển. Lidar rất tốt trong việc phát hiện chướng ngại vật và làm việc trong nhiều môi trường ánh sáng khác nhau. Nhược điểm là giá thành đắt đỏ, và không phát hiện được vật thể phản chiếu hoặc trong suốt.
Camera là loại cảm biến phổ biến trong robot AMR. Chúng dùng để thu hình ảnh vật, sau đó xử lý bằng thuật toán xử lý hình ảnh để nhận dạng vật thể, đọc ký hiệu, phát hiện đường kẻ trên sàn. Ưu điểm là công nghệ rẻ, cung cấp nhiều thông tin chi tiết. Nhược điểm là phụ thuộc vào nguồn ánh sáng và khó phát hiện vật chạy nhanh hoặc ở xa.
Cảm biến siêu âm dùng sóng âm thanh phát hiện vật thể. Cảm biến này thường được sử dụng kèm với các cảm biến khác để bổ sung thông tin. Cảm biến siêu âm không đắt và dùng trong nhiều môi trường khác nhau. Tuy nhiên hạn chế là chỉ sử dụng được với khoảng cách ngắn, không phát hiện được vật mềm hoặc có góc cạnh hấp thụ sóng âm.
Cảm biến hồng ngoại tương tự như cảm biến siêu âm nhưng sử dụng sóng hồng ngoại. Nó dùng để phát hiện vật thể, đo khoảng cách, đường kẻ trên sàn. Cảm biến hồng ngoại cũng rất rẻ và hoạt động được trong nhiều môi trường khác nhau. Tuy nhiên nó bị nhiễu bởi ánh sáng xung quanh hoặc nguồn nhiệt.
Mỗi loại cảm biến có ưu nhược điểm riêng và việc lựa chọn sử dụng là phụ thuộc vào robot và môi trường xung quanh nó. Khi cần thiết nhiều loại cảm biến được dùng kết hợp để có cái nhìn tổng thể về môi trường xung quanh. Sự kết hợp cảm biến cho robot đưa ra quyết định sáng suốt hơn và dẫn đường hiệu quả hơn.
Hệ thống dẫn đường
Dẫn đường là hệ thống quan trọng nhất của robot AMR giúp chúng có thể tự di chuyển. Chúng sử dụng cảm biến để tạo bản đồ môi trường xung quanh, vạch ra đường di chuyển đến mục tiêu, điều khiển robot di chuyển theo đường đi này. Trí tuệ nhân tạo AI đang đóng vai trò quan trọng trong phát triển robot AMR.
Có nhiều công nghệ dẫn đường đang dùng trong robot AMR. Phổ biến nhất là công nghệ SLAM (Bản đồ và định vị đồng thời Simultaneous Localization and Mapping). SLAM dùng thuật toán sử dụng dữ liệu cảm biến dựng bản đồ môi trường xung quanh trong khi đồng thời theo dõi vị trí của robot trong bản đồ đó. Nó cho phép robot di chuyển trong môi trường không xác định và thích ứng với môi trường đó.
Một công nghệ dẫn hướng phổ biến khác là dẫn hướng dùng tọa độ điểm (waypoint navigation). Trong cách dẫn hướng này, robot được đưa cho tọa độ một loạt điểm waypoint mà nó phải đi đến. Robot dùng cảm biến để di chuyển từ waypoint này đến waypoint tiếp theo, điều chỉnh đường đi để tránh vật cản. Một số AMR robot còn có chức năng chia sẻ thông tin vật cản với các robot khác để chọn đường đi tối ưu.
Thuật toán tìm đường (Path planning ) là thành phần quan trọng khác của hệ thống dẫn đường robot. Thuật toán dùng bản đồ SLAM hoặc waypoint robot thu được và xác định đường đi tốt nhất. Bao gồm đường đi ngắn nhất, tiêu thụ ít năng lượng nhất và ít vật cản nhất.
Hệ thống điều khiển lấy đường đi do thuật toán tìm đường cung cấp và ra lệnh cho ro bot dịch chuyển theo đường đi đó. Đây là quá trình lặp lại, cảm biến robot cung cấp vị trí và vận tốc thực, hệ thống so sánh với vận tốc và vị trí mong muốn, sau đó điều chỉnh động cơ.
Sự tinh tế và hiệu quả ảnh hưởng đến hiệu suất robot. Hệ thống định vị tốt cho phép ro bot dịch chuyển hiệu quả và tin cậy trong môi trường, thay đổi thích ứng và tránh chướng ngại vật. Tiêu chí này rất quan trọng với các ứng dụng như kho bãi, hậu cần, nơi robot phải dịch chuyển trong môi trường đông đúc, thực hiện công việc nhanh và chính xác.