Nhiễu xuyên điều chế thụ động, biến dạng PIM
Nhiễu xuyên điều chế thụ động (PIM) là dạng nhiễu xuyên biến dạng xuất hiện trong trong các phần tử thụ động hoặc đáp ứng không tuyến tính với tín hiệu như cáp đồng trục, đầu nối cáp đồng trục, điểm đấu nối giữa các kim loại khác nhau ... Nhiễu này thường khó tìm và chúng ta phải tìm cách loại bỏ nhiễu.
Nhiễu xuyên điều chế thụ động (PIM) là gì
Nhiễu xuyên điều chế thụ động xuất hiện khi hai hoặc nhiều tín hiệu xuất hiện trong các thành phần hoặc thiết bị thụ động không tuyến tính. Các tín hiệu này trộn hoặc nhân lên với nhau tạo ra các tín hiệu liên quan đến tín hiệu gốc. PIM chỉ xuất hiện trong các phần tử không được dự kiến hoạt động tuyến tính. Sự phối hợp các đi ốt trong mạch điện không được coi là PIM vì sự phối hợp này tạo ra biến đổi tín hiệu mong muốn. PIM thông thường tạo ra các biến đổi phi tuyến tính không mong muốn trong đầu nối, bộ chuyển mạch (switch) và bộ cách ly (isolator) ... Tại đây quá trình oxy hoá vật liệu tạo ra sự biến đổi không tuyến tính.
Trong các sản phẩm PIM tạo ra sự biến đổi không tuyến tính như trong bộ trộn tín hiệu. Các sóng hài do các tần số đầu vào trộn lẫn với nhau tạo ra các tần số đầu ra. Với tháp phát công suất cao, sự rỉ sét các ốc nối và ô xy hoá kết hợp các bộ phận không tuyến tính sẽ tạo ra nhiễu xuyên điều chế thụ động. Hiệu ứng này đôi khi được gọi là hiệu ứng bu lông gỉ.
Cơ bản về PIM
Nếu 2 tần số F1 và F2 kết hợp với nhau, tín hiệu điều chế xuất hiện tại các tần số ± M ⋅ f1 ± N ⋅f2.
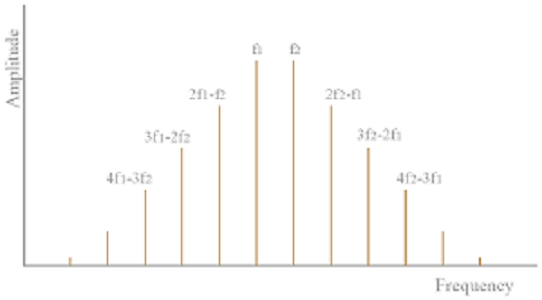
Phổ nhiễu xuyên điều chế 2 tín hiệu
Các tần số điều chế xuyên được liệt kê theo thứ tự số lần tần số kết hợp. Ví dụ 2 x F1 - 1 x F2 có thứ tự 3, 3 x F1 + 2 x F2 có thứ tự 5 ...
Bảng nhiễu xuyên thụ động
| Thứ tự | Tần số hiệu | Tần số cộng |
| 3 | 2 F1 - 1 F2 | 2 F1 + 1 F2 |
| 5 | 3 F1 - 2 F2 | 3 F1 + 2 F2 |
| 7 | 4 F1 - 3 F2 | 4 F1 + 3 F2 |
| 9 | 5 F1 - 4 F2 | 5 F1 + 4 F2 |
Tín hiệu PIM tạo ra có thể không gây nhiễu với tín hiệu khác nếu không cộng hưởng với nhau. Tuy nhiên phần lớn các tín hiệu này luôn gây nhiễu cho các tín hiệu khác. Với các sản phẩm PIM, mức nhiễu tín hiệu thường thấp nên chỉ gây nhiễu cục bộ hoặc trong một hệ thống.
Nếu 2 tần số được điều chế đưa vào, nó sẽ chiếm băng thông lớn hơn băng thông dành cho một tần số không điều chế. Khi tần số điều chế sử dụng nhiều hơn, tín hiệu điều chế trải rộng hơn và tăng mức nhiễu nền lên làm giảm hiệu suất hoạt động.

Phổ tần số nhiễu xuyên điều chế của 2 tín hiệu được điều chế.
Mức PIM điển hình và ảnh hưởng
Nhiễu xuyên điều chế thụ động thường có giá trị nhỏ. Nguyên nhân mức tín hiệu này do biến đổi không tuyến tính giả gây ra. Mức tín hiệu điển hình thấp hơn 100 db so vơí mức tín hiệu có thể là do PIM.
Mạch chủ đông như bộ khuyếch đại tạo ra mức nhiễu xuyên và biến dạng cao hơn nhưng dễ loại bỏ hơn bằng các bộ lọc. Trong khi đó nhiễu xuyên thụ động không thực hiện như vậy được.
Nhiễu xuyên thụ động phát sinh do máy phát Tx và máy thu Rx đều sử dụng antenna và cáp dẫn sóng feeder chung. Trong nhiều hệ thống cả phát và thu chạy song song dùng bộ ghép song công (duplex) trong đó phát và thu sử dụng tần số khác nhau.
Tín hiệu phát được lọc và giảm mức để không ảnh hưởng đến tín hiệu thu. Ngoài ra tín hiệu kết hợp sẽ chặn tín hiệu trực tiếp từ máy phát để không ảnh hưởng đến tín hiệu thu. Tuy nhiên nhiễu xuyên thụ động trên đường tín hiệu sau khi kết hợp, trên cáp dẫn sóng feeder hoặc antenna sẽ gây ra nhiều vấn đề. Các sản phẩm PIM sẽ gây tín hiệu không mong muốn trên băng tần thu, thập chí nhiễu trên băng phát gây sự cố.
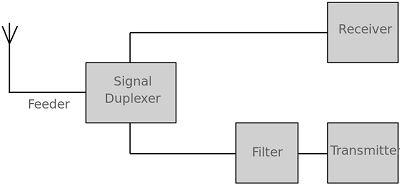
Hệ thống điển hình bị tác động bởi nhiễu xuyên điều chế
Thậm chí các sản phẩm gây nhiễu xuyên thụ động dưới 100 db hoặc thậm chí 120 dB dưới mức tín hiệu phát, mức tín hiệu này cũng đủ gây hiệu suất bộ thu bị suy giảm nếu suy giảm nằm trong băng thu.
Ví dụ điển hình hệ thống bộ phát và bộ thu dùng chung cáp dẫn sóng và ăng ten là các trạm phát sóng di động, hệ thống thu tín hiệu vệ tinh, hệ thống bộ đàm hoặc không dây sử dụng ghép song công cho tín hiệu phát và tín hiệu thu, truyền theo hai hướng sử dụng tần số khác nhau.
Nguyên nhân gây ra nhiễu xuyên điều chế thụ động
Nhiễu xuyên điều chế thụ động xuất hiện bởi sự không tuyến tỉnh dưới tác động của từ 2 tín hiệu trở lên. Có rất nhiều nguyên nhân gây ra không tuyến tính nhưng những nguyên nhân chủ yếu bao gồm:
- Tại các điểm nối khi các kim loại khác nhau kết nối và bị oxi hoá.
- Đầu nối cáp đồng trục - các đầu nối rất dễ bị oxy hoá. Đặt biệt các đầu nối mạ bạc khi lớp oxit bạc tạo ra do tác động của thời tiết hoặc sử dụng lâu ngày. Lớp oxit bạc sẽ tác động như một diốt làm tăng nhiễu xuyên điều chế thụ động. Để hạn chế các đầu nối cần được chế tạo từ thành phần chất lượng cao, thi công đúng cách và bọc chống nước khi sử dụng ngoài trời. Kể cả như vậy thì chất lượng cũng sẽ kém đi theo thời gian. Các đầu nối chế tạo vật liệu kém, hoặc thi công kém sẽ có mức tăng nhiễu xuyên điều chế thụ động nhanh hơn.
- Ống dẫn sóng feeder - ống dẫn sóng cáp đồng trục feeder tạo ra các mức nhiễu xuyên điều chế thụ động khác nhau. Lớp lưới tiếp mát sát vỏ (braid) có nhiều sợi kim loại kết nối là nguồn của nhiễu xuyên thụ động PIM. Thậm chí khi sử dụng băng tiếp mát (foild) vẫn có tác động tiếp giữa các lớp băng xung quanh lớp cách điện. Với các ứng dụng cần mức PIM thấp (Low PIM) thì các nhà sản xuất sẽ tạo ra một số loại cáp đặc biệt có mức mức PIM dưới -140dBc, nhưng với giá thành cao hơn.
- Kết nối lỏng lẻo hoặc đầu tiếp xúc không đồng nhất.
- Đầu nối bị bẩn. Kiểm tra các chỗ đầu nối bị bẩn gây xấu tín hiệu.
- Tác động hiệu ứng anode do nước hoặc hơi ẩm lọt vào đầu nối.
- Do sử dụng các kim loại nhiễm từ như sắt, niken và thép sẽ làm tăng nhiễu xuyên điều chế thụ động. Những kim loại này có hiệu ứng trễ từ khi có năng lượng. Kết quả mức tín hiệu phụ thuộc theo, mặc dù rất nhỏ đầu vào.
- Hiện tượng phóng tia lửa điện làm tăng mức nhiễu xuyên điều chế thụ động. Phóng tia lửa điện gây hư hỏng đầu nối, oxy hoá và tạo hiệu ứng đi ốt. Phóng tia lửa điện sinh ra do các loại đầu nối chất lượng kém, hoặc thậm chí các đầu nối thay nóng hoặc khi tháo các đầu nối.
Phần lớn các nguyên nhân gây ra nhiễu xuyên điều chế là các thành phần trong đầu nối cáp đồng trục. Nếu đầu nối không được vặn chặt, đầu nối bị oxyhoá ... nó sẽ là nguồn gây nhiễu xuyên điều chế thụ động.
Khó khăn trong việc tìm ra chỗ gây nhiễu xuyên điều chế thụ động là sự không tuyến tính gây nhiễu không biểu hiện ở mức tín hiệu vào thấp. Nó có nguyên nhân:
- Mức PIM thường thấp và tại mức công suất thấp các sản phẩm PIM thường dưới mức nhiễu nhiệt.
- Không đủ để xác định vật liệu liên quan. Nếu nhiễu xuyên điều chế thụ động tăng lên từ hiệu ứng trễ thí tín hiệu kích hoạt không đủ lớn để đi vòng quanh vật liệu gây trễ.
Phòng chống nhiễu xuyên điều chế thụ đông
Phần lớn vấn đề liên quan đến điều chế thụ động đều liên quan đến đường truyền dẫn tín hiệu đặc biệt là các đầu nối kết nối. Để giảm thiểu PIM cần lưu ý và thưc hiên một số công tác. Phòng bệnh bao giờ cũng tốt hơn chữa bênh.
- Kiểm tra: Khi tháo rời các đầu nối cần kiểm tra xem có bị hư hỏng vật lý không. Kim trung tâm không được lỏng, lõm hoặc xước. Bất kỳ xước hoặc bụi nào cũng gây hồ quang điện tạo hiệu ứng đi ốt, là nguyên nhân gây PIM.
- Không dùng các đầu nối bị mòn. Các đầu nối bị mòn luôn gây ra vấn đề. Nguyên nhân bị mòn đầu nối do việc tháo ra lắp vào đầu nối nhiều lần. Đặc biệt các đầu nối loại vặn sẽ có chu kỳ sử dụng thấp hơn. Một số loại đầu nối không cho phép vặn xoắn liên tục vài vòng và nhân viên kỹ thuật cần tập huấn trước khi lắp đặt để tránh gây "mòn" hư hại đầu nối.
Một số loại đầu nối được thiết kế phải vặn rất nhiều vòng trước khi có thể tháo ra khỏi thiết bị. Vì vậy khi bị lỏng, đầu nối không bị phát hiện khi dùng đo PIM mà chỉ thể hiện như có chút vấn đề về tín hiệu.
- Làm sạch: Cần làm sạch các đầu nối bị bụi bẩn để giảm PIM tạm thời, để được lâu dài hơn cần:
Loại bỏ các hạt bụi: thổi bụi dùng khí nén áp suất thấp. Dùng tăm để lấy các hạt bụi mà khí nén thổi chưa hết. Không dùng các vật sắc kim loại để lấy bụi vì sẽ gây hư hỏng bề mặt kim đầu nối.
Làm sạch bằng cồn Isopropyl: thấm cồn Isopropyl lên tăm bông để làm sạch phần còn lại bề mặt. Chỉ thấm cồn đủ dùng không dùng nhiều quá vì cồn có thể làm chảy nhựa khi dùng quá nhiều.
Thổi lại bằng khí áp suất thấp: thổi lại bề mặt bằng khí áp suất thấp để loại các hạt bụi nhỏ còn lại và làm khô bề mặt.
Cẩn thận khi vặn các đầu nối lại với nhau: Không làm xoắn các đầu nối khi nối lại hoặc vặn lại chúng với nhau. Khi bị xoắn các kim trung tâm sẽ bị xước, không nối chính xác được với nhau. Những vết xước nhỏ sẽ làm tăng cả PIM và VSWR.
- Lực vặn xoắn phù hợp: Lực vặn xoắn phù hợp với đầu nối để giảm thiểu PIM. Nếu lực vặn thấp sẽ tạo ra khe hở và gây PIM kim trung tâm. Nếu lực vặn xoắn cao quá gây xước hỏng đầu nối cũng gây PIM. Với đầu DIN 7/16 lực xoắn phù hợp khoảng 20 foot pound (tương đương 27.12 Nm), với đầu N lực xoắn phù hợp khoảng 12 inch ponds (1.4 Nm). Nếu nhà sản xuất chỉ định lực xoắn thấp hơn thì phải áp dụng lực xoắn đấy. Dùng cờ lê có lực xoắn phù hợp khi vặn các đầu nối.
Các bước trên làm giảm thiểu gây tăng PIM. Các bước này cũng làm giảm công suất phản xạ do chất lượng đầu nối kèm.
Mức PIM trong sản phẩm thường thấp nên rất khó phát hiện. Để đảm bảo PIM cần tuân thủ trong quá trình sản xuất và lưu ý những chỗ có thể gây PIM. Nếu đầu nối hoặc thiết bị bị dùng ngoài trời thì đây là khu vực cần kiểm tra PIM.
Đo và thiết bị đo PIM
Với các hệ thống điều chế thụ động, PIM là thông số ảnh hưởng nhiều đến khả năng hoạt động. Khi PIM gia tăng, cần xác định vị trí và loại trừ nguyên nhân gây nên PIM, để hiệu suất hoạt động toàn bộ hệ thống được cải thiện.
PIM ảnh hưởng nhiều lên các hệ thống truyên song công, có nghĩa là cả phát và thu cùng một lúc. Nếu như nhiều tín hiệu cùng phát một lúc thì ảnh hưởng sẽ nặng nề hơn. Với các trạm phát sóng di động thì nhièu tín hiệu phát cho cho nhiều nhà cung cấp dịch vụ thì PIM lại đặc biệt quan trọng.

Máy đo PIM
Thiết bị đo PIM
Nhiều máy đo PIM được sản xuất để nhanh chóng xác định nguyên nhân và vị trí gây lỗi PIM để phát hiện sửa chữa. Vài loại máy được thiết kế triển khai tại hiện trường, dễ dàng sử dụng.
Thiết bị đo PIM dùng đo nhiều thông số khác nhau như mức nhiễu xuyên điều chế, đôi khi cả khoảng cách từ nguồn gây nhiễu PIM đến máy đo PIM. Thông số này rất thuận tiện trong việc xác định lỗi hệ thống cáp truyền dẫn feeder khi có nhiều nguyên nhân có thể gây nên nhiễu xuyên điều chế không mong muốn.
Đo PIM
Đo PIM được yêu cầu trong nhiều lĩnh vực. Nhưng phổ biến nhất là đo PIM của ăng ten và cáp truyền dẫn feeder trạm phát sóng di động. Ở đây có nhiều nguyên nhân gây PIM như đầu nối, điểm kết nối, cáp truyền dẫn feeder cho ăng ten.
Hệ thống có thể hoạt động tốt tại thời điểm lắp đặt nhưng sẽ xuống cấp theo thời gian sử dụng, đặc biệt là tác động của thời tiết. Vì thế nên cần đo PIM để đảm bảo chất lượng hoạt động ổn định, và khi có vấn đề xuất hiện xác định nguồn gây nên tín hiệu nhiễu xuyên điều chế thụ động.
Với sự quan trọng của việc đo PIM, IEC Technical Committee 46, Working Group 6 đang làm việc để cho ra đời tiêu chuẩn về cách thức đo nhiễu xuyên điều chế thụ động cho các thiết bị thụ động RF và microwave.
Phân biệt đo quét dòng (Line sweeping) với đo PIM
Khi kiểm tra thông số RF của ăng ten và cáp feeder cho hệ thống như trạm di động thì đây là hai phép đo hay được sử dụng nhiều nhất. Mỗi phép đo phục vụ cho mỗi mục đích khác nhau:
Đo quét dòng (Line sweeping): Đây là phép đo xác định suy hao và hệ số phản xạ của hệ thống truyền dẫn tại băng tần xác định. Nó không thể xác định hệ số PIM nhưng xác định được vị trí kết nối kém có thể gây nên PIM.
Đo PIM: Đo PIM xác định nhiễu xuyên phản xạ thụ động tại sản phẩm. Nó không thể đo suy hao hay hệ số phản xạ.
Vậy hai kiểu đo này là hoàn toàn khác nhau mặc dù đều sử dụng cho hệ thống truyền dẫn vô tuyến. Chỉ khi cần xác định sản phẩm nhiễu xuyên phản xạ thì mới cần đo PIM.
Máy đo PIM
Máy đo PIM là thiết bị hoàn chỉnh gồm bộ tạo tín hiệu, phân tích phổ và một số thành phần chuyên dụng khác dùng phát hiện lỗi PIM dùng tại hiện trường như trạm di động, trạm phát sóng.
Mô hình máy đo PIM
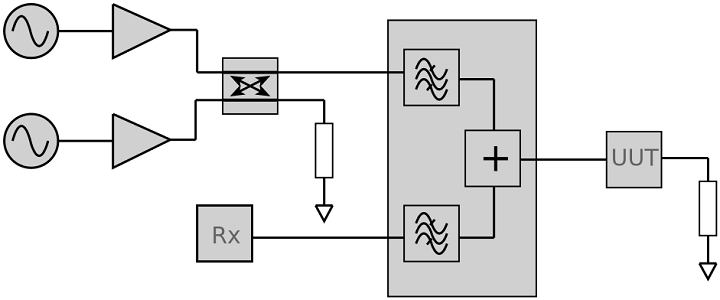
Mô hình trên làm mô hình máy đo PIM điển hỉnh. Từ máy đo PIM hai tín hiệu có tần số phụ thuộc nhau được khuyếch đại lên mức đủ lớn để thực hiện đo. Hai tín hiệu này được kết hợp trong bộ kết hợp tín hiệu (combiner) cách ly để trách tín hiệu dội ngược lại bộ tạo tín hiệu gây nhiễu xuyên điều chế ảnh hưởng đến kết quả đo.
Hai tín hiệu từ bộ tạo tín hiệu được ghép song công trong thiết bị đo PIM. Chỉ một tín hiệu được truyền qua thiết bị hoặc thành phần được test (UUT- Unit Under Testing) như cáp truyền dẫn tín hiệu, dây nhảy ... Thiết bị , thành phần được được test được đấu với tải giả 50 Ohm để đảm bảo mô phỏng.
Bất kỳ tín hiệu PIM nào tạo ra trong băng tần thu sẽ quay lại bộ ghép song công và truyền đến bộ thu RX để phát hiện mức và tần số. Tần số của tín hiệu PIM sẽ được phát hiện vì chúng sẽ liên quan đến 2 tần số phát ban đầu, f1 và f2, có tần số f1 ± m⋅f2.
Các phép đo PIM thường được thực hiện tại hiện trường. Kỹ sư đo PIM sẽ phải leo lên cột thu ăng ten hoặc một số địa hình phức tạp khác để thực hiện các phép đo kiểm này. Vì thế nên máy đo PIM cần thiết kế để vận hành với sự can thiệp tối thiểu của con người. Máy phải được thiết kế nhỏ gọn, ít thiết lập phù hợp với kỹ sư vận hành trên cột cao.