Công nghệ phát hiện và đo đạc bằng ánh sáng Lidar là phương pháp thu thập dữ liệu mật độ dày đặc và độ chính xác cao cảnh quan, địa hình vùng nước nông, địa điểm dự án. Công nghệ cảm biến chủ động này tương tự như radar nhưng dùng tia laser thay cho sóng vô tuyến. Thiết bị Lidar thường bay hoặc lắp trên máy bay để thu thập nhanh chóng địa hình khu vực rộng lớn. Lidar cũng được lắp trên các trạm mặt đất hoặc phương tiện di động. Công nghệ này rất phổ biến trong lĩnh vực khảo sát, kỹ thuật bởi tạo ra mật độ điểm với độ chính xác cao để biểu diễn ba chiều đường sắt, đường bộ, cầu, tòa nhà ...
Thu thập dữ liệu bằng Lidar có một số ưu điểm hơn so với các công nghệ khác. Ưu điểm chính là độ phân giải cao, chính xác đến centimet, phát hiện vật thể mặt đất trong địa hình rừng.
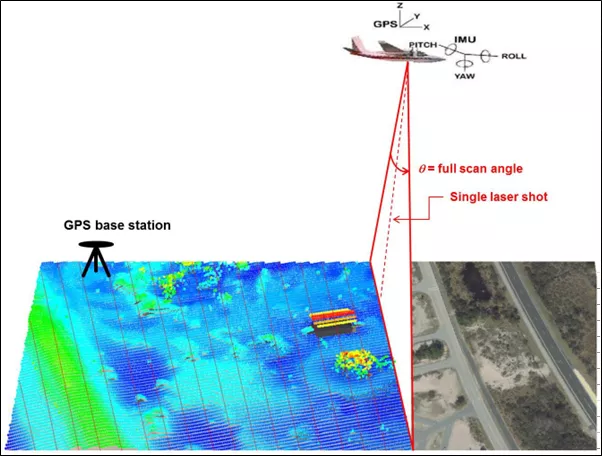
Hình 1 - Đo đạc dùng công nghệ Lidar từ máy bay thực hiện quét ảnh song song ảnh địa hình.
Lidar là gì
Lidar công nghệ đo đạc dùng tia laser, là công nghệ phát hiện và đo đạc dùng ánh sáng. Thiết bị phát ra ánh sáng mạnh tập trung, sau đó đo thời gian phản xạ quay lại cảm biến. Thông tin thu thập được dùng tính toán khoảng cách đến vật thể. Như vậy, Lidar tương tự như công nghệ radar, ngoại trừ việc sử dụng xung laser thay thế. Tọa độ 3 chiều (x,y,z hoặc kinh độ, vĩ độ, độ cao) được tính toán từ: 1, thời gian lệch giữa xung laser phát đi và quay lại. 2, Góc xung laser bắn ra 3, Vị trí cảm biến trên bề mặt hoặc trên cao mặt đất.
Có hai công nghệ cảm biến theo nguồn năng lượng laser phát ra để phát hiện vật thể: thụ động hay chủ động. Hệ thống thụ động dựa trên nguồn phát xạ năng lượng bên ngoài chẳng hạn như mặt trời, trong khi đó chủ động tạo ra năng lượng và hướng về mục tiêu, sau đó phát hiện bức xạ. Lidar là công nghệ chủ động do nó phát ra chùm xung laser và phát hiện ánh sáng phản xạ. Đặc tính này cho phép Lidar thu thập dữ liệu vào ban đêm khi không khí trong hơn, bầu trời ít dịch chuyển khí hơn ban ngày. Thực tế hầu hết dữ liệu Lidar đều được thu thập vào ban đêm. Không như radar, Lidar không thể xuyên được qua mây, mưa, sương mù dày đặc mà phải hoạt động trong thời tiết đẹp.
Lidar có thể đo nhanh bề mặt trái đất với tốc độ 150 Khz (tức là 150 nghìn xung ánh sáng trong 1 giây). Kết quả thu được là mạng lưới không gian dày đặc các điểm độ cao địa lý chính xác cao - thường gọi là đám mây điểm - tạo ra hình ảnh biểu diễn ba chiều bề mặt trái đất và các đặc điểm của nó. Nhiều Lidar hoạt động trong vùng gần hồng ngoại của quang phổ điện từ, một số cảm biến hoạt động ở băng xanh lá cây để xuyên qua nước và phát hiện địa hình đáy biển. Lidar đo độ sâu dùng ở vùng nước trong để xác định độ cao đáy biển. Độ cao thu từ Lidar có độ chính xác tuyệt đối từ 15-30 cm đối với công nghệ cũ và 10-20 cm với công nghệ mới, độ chính xác với các địa hình liên quan như đồi, bờ, cồn cát còn cao hơn. Độ chính xác của Lidar cũng là đặc điểm nổi bật, sẽ được đề cập sâu hơn.
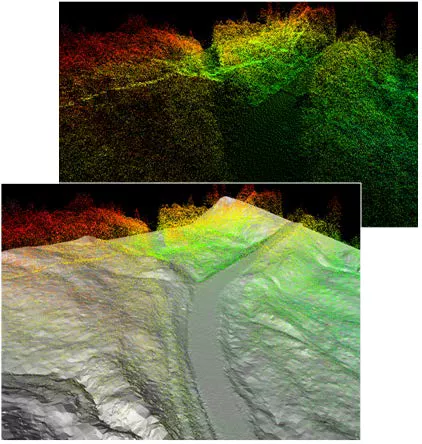
Hình 2 - Điểm và bề mặt Lidar.
Lidar có khả năng "nhìn qua tán lá cây" khi thu thập từ máy bay hoặc vệ tinh. Hầu hết dữ liệu thu thập từ trên không đều là loại không xuyên qua lá cây. Lidar cũng không ngoại lệ. Tuy nhiên thường có đủ các "điểm", hoặc chỉ một phần nhỏ tia xuyên qua lá cây, là đủ bao phủ khu vực có rừng. Lidar có thể nhìn xuyên quá các lỗ trên tán cây hoặc thảm thực vật. Các khu rừng rậm hoặc bị che phủ hoàn toàn (như rừng mưa nhiệt đới) có rất ít lỗ hổng, vì vậy vẽ mặt đất rất kém. Nguyên tắc chung là nếu bạn nhìn lên mà thấy bầu trời qua tán cây thì khu vực đó đo đạc được bằng Lidar.
Nền tảng Lidar
Hệ thống Lidar địa hình hàng không (Airborne topographic lidar system) là hệ thống lidar phổ biến nhất tạo mô hình độ cao kỹ thuật số. Việc kết hợp thiết bị hàng không và máy quét lidar là kỹ thuật hiệu quả thu thập dữ liệu độ cao cho diện tích hàng chục hoặc hàng nghìn km2. Với diện tích bé hơn cần mật độ điểm cao hơn, thiết bị lidar sẽ được gắn lên trực thăng, trạm mặt đất (mặt nước) hoặc phương tiện di động.
Lidar ban đầu được dùng cho trạm mặt đất cố định để nghiên cứu thành phần khí quyển, đám mây .. và là công cụ mạnh mẽ quan sát khí hậu. NOAA và các viện nghiên cứu vận hành thiết bị để tìm hiểu về biến đổi khí hậu. Lidar còn được gắn lên chân máy cố định để quét mục tiêu cụ thể như tòa nhà, cầu, bãi biển ... Tripod Lidar cho độ chính xác đến cm dùng cho ứng dụng khảo sát địa hình yêu cầu cập nhập thường xuyên.
Các hệ thống định vị và dẫn đường cho phương tiện di động trên mặt nước và mặt đất cũng sử dụng lidar để thu thập dữ liệu. Hệ thống được lắp trên xe thể thao và xe điện hình để quét phạm vi hơn 1km. Dữ liệu thu từ các nền tảng này có độ chính xác cao, sử dụng lập bản đồ các khu vực riêng biệt bao gồm đường sắt, đường bộ, sân bay, tòa nhà bến cảng và bờ biển.
Một số thuật ngữ cơ bản
Các thuật ngữ quan trọng mô tả độ chính xác thu thập dữ liệu của Lidar.
LAS. định dạng tệp tin laser dữ liệu đám mây 3 chiều trao đổi dữ liệu. Mặc dù định dạng này thiết kế cho Lidar nhưng hỗ trợ bất kỳ định dạng 3 chiều x-y-x nào. Giá trị (x, y, z): thể hiện tọa độ (x, y) và độ cao (z) thể hiện vị trí chính xác của điểm. Trong đó, giá trị độ cao của điểm là giá trị quan trọng thể hiện cấu trúc bề mặt và thường được sử dụng nhiều nhất trong bài toán phân lớp đám mây điểm LiDAR.
RMSE. Lỗi root mean square error.
Độ chính xác FVA Fundamental Vertical Accuracy. Đo độ chính xác dữ liệu khu vực mở với độ tin cậy cao, tính theo công thức RMSE x 1.96 = FVA.
Classification. Dữ liệu đã được xử lý để xác định kiểu đối tượng xung chiếu không phản xạ được, hoặc không được phân loại như tòa nhà hoặc thảm thực vật. Dữ liệu phổ biến nhất được phân loại là "đất trống".
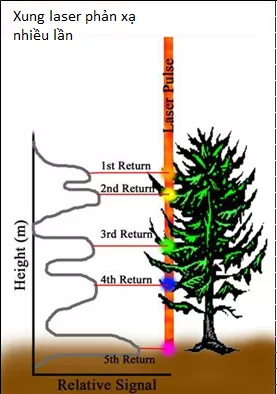
Return Number (First/Last Returns). Thiết bị thu lidar thu nhận xung phản hồi thứ nhất, thứ hai, thứ ba ... và cuối cùng từ một tia chiếu laser. Thứ tự nhằm xác định tia phản hồi này từ đâu, tia đầu tiên sẽ là đối tượng địa lý cao nhất như ngọn cây hay đỉnh tòa nhà.
Khoảng cách Point Spacing. Khoảng cách giữa các điểm laser, tương tự kích thước điểm ảnh của ảnh trên không.
Pulse Rate. Tốc độ xung laser thiết bị bắn ra trong 1 giây. Tại thời điểm 2012 tốc độ bắn xung vào khoảng 300.000 xung / giây và thu được từ 50.000 - 100.000 xung / giây.
Intensity Data. Khi tia laser phản xạ được thu thiết bị ghi lại cường độ tia laser. Giá trị thu được biểu thị khả năng phản xạ của bề mặt, dữ liệu thu được tạo nên ảnh như ảnh đen trắng.
RTK GPS (Real Time Kinematic GPS). ĐỊnh vị vệ tinh sử dụng sóng mang truyền tín hiệu GPS thay cho tín hiệu GPS thông thường. Tín hiệu GPS có tần số 1 MhZ, trong khi pha sóng mang có tần số 1500 Mhz, nên tín hiệu chính xác hơn. Pha sóng mang thiết bị đắt và khó sử dụng hơn, nhưng sau khi phân giải nó tạo độ chính xác cao hơn.
DEM (Digital Elevation Model - mô hình độ cao kỹ thuật số). Bề mặt tạo ra từ dữ liệu độ cao địa hình. DEM dễ sử dụng hơn với ứng dụng GIS hoặc CAD so với dữ liệu thô.
Nguyên tắc và kỹ thuật cơ bản
Ý tưởng công nghệ khá cơ bản, đo thời gian xung laser chiếu vào vật thể và phản xạ quay lại cảm biến (xem hình dưới). Bản thân cảm biến đã biết vị trí do hệ thống tham chiếu vị trí trực tiếp, xác định khoảng cách qua thời gian di chuyển xung, ghi lại góc chiếu laser, từ các thông tin đó tính toán vị trí vật thể phản xạ trong không gian 3 chiều.
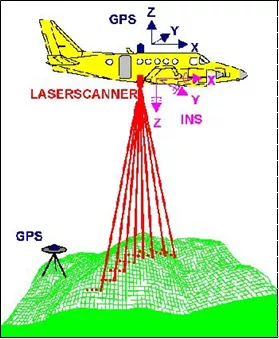
Hình 3 - Thu thập dữ liệu Lidar từ trên không.
Trên thực tế để đạt độ chính xác cao cỡ cm trong khi máy bay bay với tốc độ 160 - 300 km/h phát ra hàng trăm ngàn tia laser trong 1 giây thì quá trình này phức tạp hơn. Nhiều công nghệ trong đó có công nghệ định vị toàn cầu GPS và con quay hồi chuyển được kết hợp tạo ra độ chính xác này.
Những tiến bộ trong công nghệ Đơn vị đo lường quán tính Inertial Measuring Units (IMU) hoặc Hệ thống Dẫn đường Quán tính Inertial Navigation Systems (INS) giúp định vị chính xác máy bay. Hệ thống này đo được chuyển động theo mọi hướng và chuyển phép đo thành tọa độ vị trí. Tuy nhiên độ chính xác này bị mất sau một khoảng thời gian ngắn khoảng 1 giây. Thiết bị GPS cực kỳ tinh vi ghi lại tín hiệu GSP từ các vệ tinh khác nhau dùng để cập nhập lại IMU và INS sau khoảng thời gian đó. Vị trí GPS được máy bay và trạm mặt đất có vị trí đã biết ghi lại. Trạm mặt đất cấp cung cấp hệ số "sửa sai" với tín hiệu GPS được ghi lại bởi máy bay.
Các hệ thống lidar có những bước tiến bộ đáng kể. Ban đầu thiết bị có khả năng xử lý 10.000 điểm / giây to lớn cồng kềnh. Các hệ thống mới nhỏ gọn hơn khả năng xử lý đến 300.000 điểm / giây. Hệ thống đều thu được tín hiệu phản hồi nhiều lần, tối đa 5 lần phản hồi với mỗi xung chiếu. Điều này làm tăng lượng dữ liệu lên 30% và tăng khả năng quan sát cấu trúc 3 chiều của vật thể, như tán lá rừng hoặc tầng cây bụi.
Tổng quan ứng dụng
Lidar với ưu điểm độ chính xác cao, mật độ điểm cao, vùng phủ rộng, lập bản đồ nhanh có những ứng dụng chính sau đây
Tạo và cập nhập bản đồ lũ lụt
Đây là ứng dụng chính cho việc phát triển Lidar. Trận bão North Carolina đã tạo động lực cho phát triển mạnh mẽ lidar khi các ứng dụng khác không đủ nhanh chóng cập nhập bản đồ vũng lũ lụt.
Nghiên cứu bảo vệ rừng
Trước khi có lidar rất tốn kém để đo cây ngoài thực địa. Thông thường người ta sẽ đo mẫu vài cây và ngoại suy kết quả trên toàn khu vực khai thác. Việc đo cây xác định có bao nhiêu cây tại thời điểm đó, thời điểm thích hợp để khai thác và số lượng khai thác. Công nghệ lidar dùng để đếm cây, đo độ cao và chiều rộng tán cây, chiều cao tán cây. Từ phép đo này sẽ tính được thể tích gỗ từng khu vực.
Lập bản đồ thay đổi bờ biển
Đây cũng là ứng dụng chính của Lidar khi kết hợp cùng dữ liệu GIS. Khu vực có sự thay đổi cao trong thời gian ngắn (như sóng, thủy triều, bão ... ). Những thay đổi nhanh chóng này ảnh hưởng đến quần thể đang sinh sống. Dữ liệu Lidar cung cấp khả năng đo lường sự ảnh hưởng này trong thời gian dài hạn, đánh giá ảnh hưởng trong tương lai.
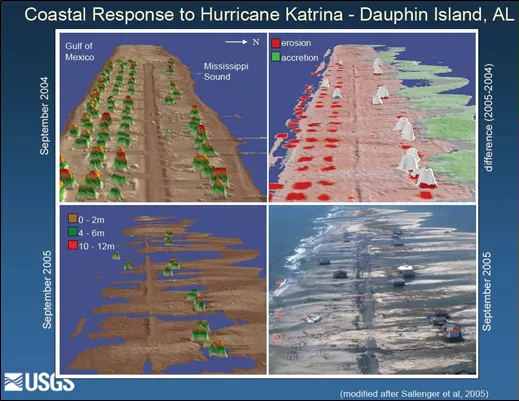
Dùng Lidar đánh giá đường bở biển trước và sau cơ bão Katrina
Tiêu chuẩn an toàn tia laser Lidar
Tiêu chuẩn IEC 60825-1 phân loại độ an toàn laser theo các tiêu chí như mức phát xạ, bước sóng laser, khả năng gây hại với con người ... Các loại laser được phân loại bao gồm:
- Loại 1: An toàn cho mắt trong mọi điều kiện. Đây là loại laser có phổ từ 180nm đến 1mm. Laser loại 1 có công suất truyền nhỏ hơn 0,39 MW.
- Loại 1M: hầu như an toàn cho mắt trừ khi sử dụng với dụng cụ quang học như kính lúp. Loại 1 và 1M được gọi là laser vô hình.
- Loại 2: không an toàn cho mắt nếu tiếp xúc lâu. Loại laser này có thể nhìn thấy bằng mắt thường.
- Loại 2M: không an toàn khi sử dụng cùng thiết bị quang học.
- Loại 3R và 3B: Phát xạ mức cao đáng kể. 3R gây hại thấp, 3B gây hại cao. Loại laser này gây nguy hiểm cho mắt và da người.
- Loại 4: mức phát xạ cao nhất, cần có đồ bảo hộ cá nhân đặc biệt khi tiếp xúc.
Các sản phẩm Lidar phải tuân thủ theo phân loại này. Việc ngày càng sử dụng nhiều robot tự hành, UAV, xe tự lái đã gây lo ngại nhiều về sự hiện diện của Lidar trong cuộc sống con người. Phần lớn các nhà sản xuất muốn giảm thiểu nguy cơ rủi ro đó nên chỉ sản xuất sản phẩm loại 1 hoặc 1M.
Yếu tố bước sóng
Các thiết bị Lidar hoạt động ở bước sóng 905 nm hoặc 1550 nm. Bước sóng 1550 được đưa ra sau này, và hiện vẫn có tranh luận bước sóng nào tốt nhất.
Bước sóng 950 nm là bước sóng đầu tiên được sử dụng cho hệ thống dẫn đường trên xe. Bước sóng 950 nm cần phải bị giới hạn công suất phát để đảm bảo an toàn cho mắt và đạt tiêu chuẩn an toàn loại 1. Kết quả hệ thống Lidar trên xe sử dụng bước sóng này chỉ có tác dụng dưới 100 m. Khoảng cách này đủ cho môi trường đô thị, nhưng lại không đạt độ an toàn trên đường cao tốc.
Bước sóng 1550 nm cho khoảng cách phát hiện xa hơn, nhưng lại không hoạt động tốt trong điều kiện mưa và sương mù. Bước sóng này cũng yêu cầu công suất phát lớn hơn, làm tăng chi phí vận hành.