Xyron là thương hiệu của Asahi Kasei cho dòng nhựa polyphenylene cải tiến (modified polyphenylene ether - mPPE). Đây là loại nhựa kỹ thuật độc đáo tạo ra bằng sự kết hợp của PPE với các nhựa khác như polystyrene (PS), polyamide (PA), polypropylene (PP), polyphenylene sulfide (PPS) hoặc các polyme khác. Cùng thêm sự kết hợp của sợi thủy tinh đặc tính nhựa được thay đổi tùy theo nhu cầu của ngành sản xuất.
Tài liệu kỹ thuật
Tài liệu kỹ thuật
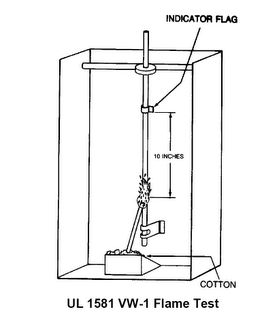
Đây là thử nghiệm nhỏ về khả năng bắt lửa của vật liệu cách nhiệt. Quá trình thử nghiệm được tiến hành bằng cách đặt một đoạn cáp cố định theo chiều thẳng đứng trong vỏ hộp kim loại có ba mặt, ở dưới có đặt lớp bông phẫu thuật.
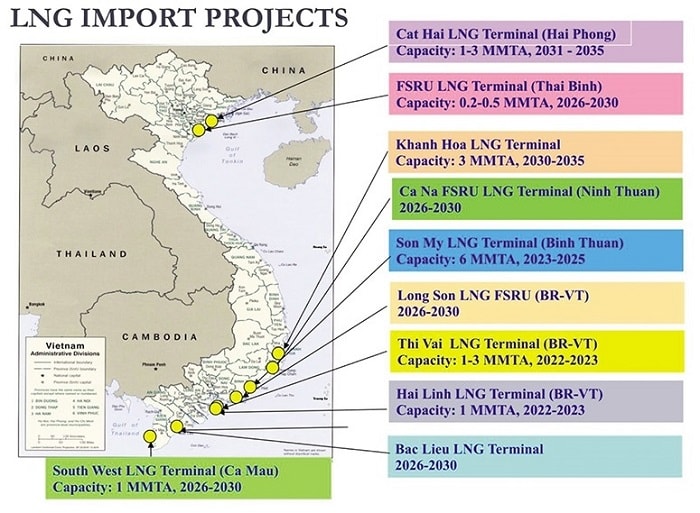
Danh mục dự án cảng nhập khí LNG
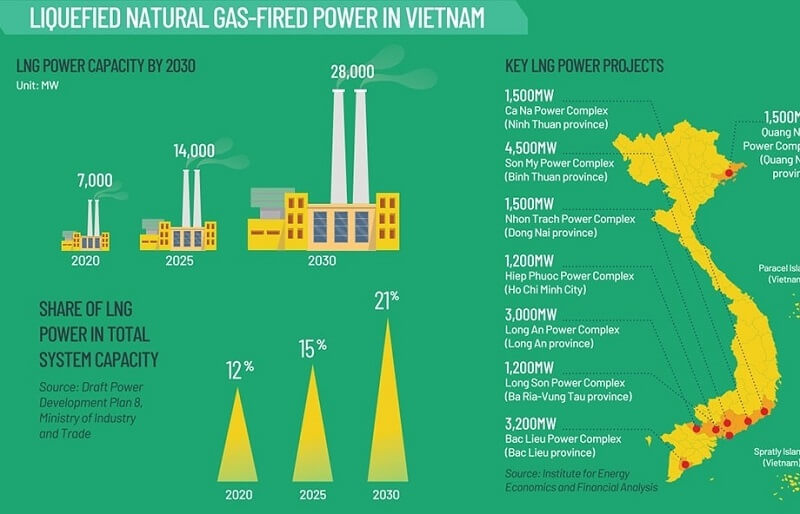
Việc chuyển đổi từ phát điện bằng than sang phát điện khí hoá lỏng đặc biệt quan trọng với an ninh năng lượng của Việt Nam, đảm bảo cung cấp điện, giảm phát khí thải nhà kính.
Danh mục dự án điện khí
4/5/2022 Danh mục các nhà máy điện khí theo dự thảo Quy hoạch Điện 8
|
Nội dung/ Năm |
2025 |
2030 |
2031-2045 |
Ghi chú |
|
LNG Quảng Ninh I |
|
1 500 |
|
|
|
LNG Thái Bình |
|
1 500 |
|
|
|
LNG Nghi Sơn |
|
1 500 |
|
|
|
LNG Quỳnh Lập |
|
1 500 |
|
|
|
LNG Quảng Trạch 2 |
|
1 500 |
|
Theo Thông báo số 54/TB-VPCP ngày 25/02/2022 |
|
NĐ LNG miền Bắc |
|
|
4 500 |
Các vị trí tiềm năng có thể xem xét giai đoạn 2031-2045: |
|
LNG Hải Lăng |
|
1 500 |
|
|
|
LNG Chân Mây (*) |
|
|
1 500 |
Dự phòng cho các dự án chậm tiến độ hoặc không thể triển khai trên thực tế và/hoặc sử dụng khí trong nước khi mỏ Kèn Bầu có kế hoạch phát triển. |
|
LNG Cà Ná |
|
1 500 |
|
|
|
LNG Sơn Mỹ II |
|
2 250 |
|
|
|
LNG Sơn Mỹ I |
|
2 250 |
|
|
|
LNG Long Sơn |
|
1 500 |
|
|
|
LNG Nhơn Trạch 3&4 |
1500 |
|
|
|
|
LNG Hiệp Phước GĐ I |
1200 |
|
|
|
|
LNG Long An I |
|
1 500 |
|
|
|
LNG Long An II |
|
|
1 500 |
Đã được bổ sung QHĐ VII điều chỉnh theo Văn bản số 1080/TTg-CN ngày 13/8/2020 |
|
LNG Bạc Liêu |
800 |
2 400 |
|
|
|
LNG miền Nam |
|
|
1 500 |
Các vị trí tiềm năng có thể xem xét giai đoạn 2031-2045: |