MIL-STD-1553 là tiêu chuẩn quân sự của Bộ Quốc phòng Hoa Kỳ, xác định đặc tính cơ học, điện và chức năng bus dữ liệu nối tiếp. Ban đầu nó được thiết kế để sử dụng với hệ thống radar quân sự, sau đó được sử dụng trong các hệ thống (spacecraft on-board data handling OBDH), dùng cho cả dân sự và quân sự. Thiết kế hai lớp vật lý cân bằng dự phòng, giao diện mạng tách biệt, ghép kênh phân chia thời gian, giao thức half-duplex command/response, và hỗ trợ lên đến 31 thiết bị đầu cuối từ xa. Phiên bản của MIL-STD-1553 sử dụng hệ thống cáp quang thay cho điện được gọi là MIL-STD-1773.
MIL-STD-1553 được công bố lần đầu tiên bởi không quân Mỹ vào năm 1973, và lần đầu tiên được sử dụng trên máy bay F-16 Falcon. Tiếp theo các máy bay F-18 Hornet, AH-64 Apache, P-3C Orion, F-15 Eagle và F-20 Tigershark. Bây giờ nó được sử dụng rộng rãi bởi quân đội Mỹ và NATO dưới tên STANAG 3838 AVS. STANAG 3838, được sử dụng trên máy bay Panavia Tornado; BAE Systems Hawk (Mk 100), trên Eurofighter Typhoon. Nga sử dụng MIL-STD-1553 trên mIG 35.
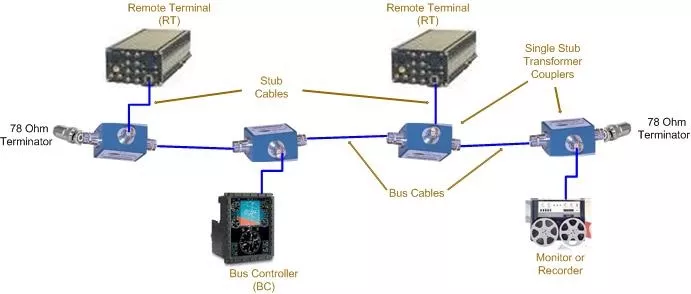
Mô hình MIL-1553 single bus với 2 máy đầu cuối (Remote Terminal) và 01 màn hình theo dõi (monitor).
Kiến thức cơ bản về MIL-1553
Mạng (bus dữ liệu) 1553 có kiến trúc không đồng nhất bao gồm nhiều máy tính (Thiết bị đầu cuối - RT) kết nối mạng theo quan hệ master/slave. Thông điệp truyền tin được điều khiển bởi máy tính / thiêt bị đầu cuối master gọi là Bus Controller (BC). BC khởi tạo truyền tin giữa các máy tính đầu cuối (Remote Terminals - RT). Trên mạng cũng có các thiết bị theo dõi "nghe" các gói tin gọi là (Bus Monitor – BM). Tiêu chuẩn hoàn toàn dựa trên lớp 2 truyền tin nên tần số làm việc và bus liên kết dữ liệu tùy thuộc vào người thiết kế hệ thống.
Lớp vật lý
Bus sử dụng cặp dây duy nhất trở kháng 70-85 Ω tại tần số 1 MHz. Đầu connector kết nối với bus dùng tín hiệu mức cao Manchester hai trạng thái. Cặp thu phát nhận tín hiệu qua biến áp cách ly, kết nối nhánh dùng điện trở cách ly và biến áp ghép nối. Việc này làm tránh ngắn mạch và để không có dòng rò ra máy bay. Mã Manchester được sử dụng cho cả thời gian và dữ liệu trên cùng một đôi dây và loại bỏ tất cả thành phần DC trong tín hiệu (không qua các máy biến áp). Tốc độ bit là 1.0 Mbps (1 bit mỗi ms). Sự kết hợp độ chính xác và ổn định của tốc độ bit trong phạm vi ± 0,1%; Điện áp đầu ra đỉnh- là 18-27 V.
Giao thức bus
Hệ thống ghép kênh bus MIL-STD -1553 bao gồm bộ điều khiển bus (Bus Controller - BC) kiểm soát nhiều thiết bị từ xa (Remote Terminals - RT) kết nối với nhau qua cáp bus dữ liệu tạo đường dẫn duy nhất từ bộ điều khiển bus BC đến các thiết bị từ xa liên quan. Cũng có thể có một hoặc nhiều thiết bị theo dõi bus (Bus Monitors - BM) nhưng thiết bị này không được phép tham gia vào việc truyền dữ liệu , và chỉ được sử dụng để ghi lại dữ liệu để phân tích. Khi lắp thêm bus dự phòng, sẽ có nhiều hơn một tuyến dữ liệu, ví dụ tuyến dự phòng thứ hai, tuyến dự phòng thứ ba. Tất cả truyền dẫn trên tuyến dữ liệu được điều khiển bởi bộ điều khiển bus và các thiết bị kết nối từ xa. Dữ liệu được truyền dùng một hoặc nhiều word (16-bit). 16 bit sử dụng mã Manchester, mà logic 1 biểu diễn bằng xung mức cao 0.5 μs và mức thấp 0.5 μs và trình tự thấp-cao cho logic 0 . Mỗi word phân tách bởi xung đồng bộ 3 μs ( 1.5 μs mức thấp và 1.5 μs mức cao) và mã sửa sai chẵn lẻ. Trên thực tế, mỗi word sẽ dài 20 -bit : 3 bit cho đồng bộ , 16 bit cho dữ liệu và 1 bit để kiểm soát lẻ . Các word được truyền nối tiếp và có tối thiểu 4 μs giữa các thông điệp .
Thông tin trên bus từ bộ điều khiến Bc đến thiết bị RT để nhận hoặc truyền. Dãy các từ, (dưới dạng <điểm gốc>.<word_type(đích)> dùng chuyển dữ liệu từ bộ điều khiển (BC) đến thiết bị kết nối như sau:
master.command(terminal) → terminal.status(master) → master.data(terminal) → master.command(terminal) → terminal.status(master)
và từ thiết bị đến thiết bị là
master.command(terminal_1) → terminal_1.status(master) → master.command(terminal_2) → terminal_2.status(master) → master.command(terminal_1) → terminal_1.data(terminal_2) → master.command(terminal_2) → terminal_2.status(master)
Có nghĩa là mọi liên lạc đều được bắt đầu bằng bộ điều khiển bus (BC), thiết bị kết nối không tự khởi tạo liên lạc được. Trường hợp một thiết bị kết nối từ xa RT truyền đến thiết bị kết nối từ xa RT khác như sau: ứng dụng hoặc chức năng trong hệ thống phụ sau giao diện RT (ví dụ RT1 ) ghi dữ liệu được truyền vào vùng xác định địa chỉ phụ ( bộ đệm dữ liệu ) . Thời gian dữ liệu này được ghi vào địa chỉ phụ không nhất thiết phải liên quan đến thời điểm giao dịch. Bộ điều khiển bus ra lệnh cho RT đích đến của dữ liệu (ví dụ RT2 ) nhận dữ liệu tại vùng địa chỉ dữ liệu xác định và lệnh RT1 truyền dữ liệu từ vùng địa địa chỉ quy định trong lệnh . RT1 truyền word Trạng thái (Status), báo tình trạng hiện tại của nó , sau đó dữ liệu. Bộ điều khiển BUS nhận word trạng thái, kiểm tra lệnh truyền đã được nhận và không có vấn đề gì . RT2 nhận được dữ liệu trên bus chia sẻ dữ liệu và viết ghi lại dữ liệu vào vùng địa chỉ phụ và truyền word Trạng thái của nó . Ứng dụng hoặc chức năng trên hệ thống con sau giao diện RT nhận sau đó có thể truy cập dữ liệu . Một lần nữa, thời gian đọc này không nhất thiết phải liên kết với việc truyền. Bộ điều khiển BUS nhận word trạng thái RT2 và thấy rằng các lệnh tiếp nhận và dữ liệu đã được nhận và hoạt động không có lỗi.
Có sáu kiểu giao dịch được phép giữa BC và một RT xác định hoặc giữa BC và cặp RT.
1. Truyền BC đến RT. BC gửi 16-bit word lệnh, theo sau là từ 1-32 16-bit word dữ liệu. Thiết bị RT được chọn sẽ gửi 16-bit word tình trạng.
2. Truyền RT đến BC. BC gửi word lệnh đến RT. RT gửi word trạng thái, theo sau là từ 1-32 word dữ liệu.
3. Truyền RT RT. Bộ điều khiển BC gửi word lệnh nhận và word lệnh chuyển. RT truyền sẽ gửi word trạng thái, tiếp sau là 1-32 word dữ liệu. RT nhận sẽ gửi word trạng thái của nó.
4. Chế độ lệnh không có dữ liệu word. BC gửi word lệnh với địa chỉ Sub-address 0 hoặc 31 xác định lệnh mã chế độ (Mode Code). RT trả lời bằng word trạng thái.
5. Chế độ lệnh với word dữ liệu (truyền tin). BC gửi lệnh với Sub-Address 0 hoặc 31 xác định mã chế độ (Mode Code). RT trả lời bằng word trạng thái, tiếp theo là word dữ liệu duy nhất.
6. Chế độ lệnh với word dữ liệu (Nhận tin). BC gửi lệnh với Sub-Address 0 hoặc 31 xác định mã chế độ tiếp theo là word dữ liệu duy nhất. RT đáp ứng với word trạng thái.
![]()