Ra đời vào giữa những năm 1990, đo động thời gian thực (Real-time kinematic positioning - RTK) là kỹ thuật GNSS vi sai cho phép định vị độ chính xác cao trong vùng lân cận bằng cách đo phase sóng mang giữa trạm tĩnh (base station) và trạm động (rover station) để loại bỏ sai số định vị theo phương pháp chỉ sử dụng vệ tinh, cho độ chính xác đến mức centimet. Phương pháp này được sử dụng trong khảo sát đất đai, thủy văn và dẫn đường máy bay không người lái.
Nguyên tắc hoạt động
Kỹ thuật định vị dùng tín hiệu vệ tinh GNSS thông thường như trên điện thoại di động, đồng hồ thông minh ... nhận tín hiệu trực tiếp từ các vệ tinh GNSS và tính toán vị trí sử dụng so sánh thời gian truyền từ các vệ tinh GNSS đến thiết bị thu. Độ chính xác của các hệ thống này khoảng từ 1-4 mét.
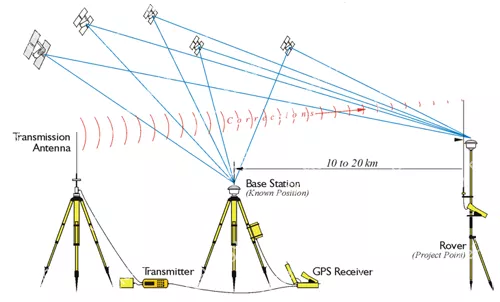
Trạm RTK bao gồm trạm tĩnh (base station) và trạm động (Rover station). Trạm tĩnh là trạm thu tín hiệu vệ tinh tại vị trí đã xác định. Trạm tĩnh tính toán vị trí của nó sử dụng tín hiệu thu từ vệ tinh GNSS dựa trên kỹ thuật đo phase sóng mang. Nó so sánh vị trí thu được từ vệ tinh với vị trí đã xác định của trạm để tính toán sai số và tạo ra tín hiệu hiệu chỉnh.
Tín hiệu hiệu chỉnh được truyền liên tục theo thời gian thực đến trạm động. Trạm động dùng tín hiệu hiệu chỉnh để điều chỉnh lại vị trí thu được từ vệ tinh GNSS nhằm đạt độ chính xác đến cm. Trạm động cũng sử dụng kỹ thuật đo phase sóng mang để xác định vị trí. Bộ truyền sóng radio từ trạm tính bao gồm ăng ten, bộ điều chế vô tuyến (radio modulator) và bộ khuếch đại. Bộ điều chế chuyển tín hiệu hiệu chỉnh sang sóng vô tuyến. Bộ khuếch đại tăng cường sóng vô tuyến truyền tín hiệu chỉnh đi xa.
Cần lưu ý là trạm tĩnh cần mất một thời gian để tính toán hiệu chỉnh, chuyển thành dữ liệu gói và truyền đi. Nên dữ liệu phải mất một thời gian để truyền từ trạm tĩnh đến trạm động, gọi là độ trễ. Độ trễ sẽ khoảng từ 1/4 giây cho đến vài giây. Và vì tín hiệu hiệu chỉnh chỉ chính xác trong một khoảng thời gian kể từ khi nó được tính ra, nên trạm gốc phải truyền khoảng thời gian hiệu lực của tín hiệu hiệu chỉnh cùng. Dùng khoảng thời gian hiệu lực tín hiệu hiệu chỉnh này, trạm di động có thể hiệu chỉnh lùi lại phù hợp với thời gian đo.
Trạm tĩnh ở vị trí cố định và cung cấp hiệu chỉnh cho nhiều trạm động trong phạm vi xác định. Tất cả các máy đều sử dụng một vệ tinh lần lượt. Trạm động di chuyển từ điểm này đến điểm khác, dừng lại một chút tại mỗi điểm để đo đạc trước khi chuyển sang trạm mới. Trạm tĩnh và trạm động phải được điều chỉnh về cùng tần số để kết nối liên lạc.
Trạm tĩnh RTK bao phủ khu vực hoạt động khoảng từ 10 - 20 cây số, cần có kênh kết nối truyền thông thời gian thực giữa trạm gốc và máy rover. Hệ thống RTK dùng chung tiêu chuẩn áp dụng cho hệ thống DGNSS, dùng chuẩn truyền dữ liệu do Special Committee 104 về DGNSS Ủy ban Kỹ thuật Vô tuyến dùng cho Dịch vụ hàng hải (Radio Technical Commission for Maritime Services - RTCM). Ngoài RTCM còn có các tiêu chuẩn độc quyền DGPS/RTK khác như Trimble Compact Measurement Record (CMR).
Ưu điểm của RTK GPS
Đặc tính chính của RTK GPS là định vị với độ chính xác cao đến mức cm khiến đây là công nghệ lý tưởng cho nhiều ứng dụng. Một ưu điểm nữa là cung cấp dữ liệu theo thời gian thực mức miligiây, sử dụng trong dẫn đường thời gian thực như xe tự lái, máy bay không người lái ... Ngoài ra RTK GPS còn có thêm những ưu điểm sau:
- Tuổi thọ pin dài: do dùng định vị trạm cố định bổ sung tín hiệu vệ tinh nên thiết bị hoạt động trong thời gian dài không cần nạp lại.
- Thiết bị bền vững hoạt động trong các môi trường có địa hình khó khăn.
- Chi phí thấp: so với các công nghệ định vị chính xác cao thì thiết bị có chi phí thấp nhất, giúp nhân viên đo đạc đến các công ty xây dựng đều trang bị được.
Yêu cầu của RTK
RTK yêu cầu kết nối không dây thời gian thực giữa trạm tĩnh và trạm động. Ăng ten vô tuyến cho trạm động được tích hợp với ăng ten GNSS hoặc tách riêng. Thông thường antenna phát trạm tĩnh và máy động đều dùng omnidirectional whip, trạm tĩnh dùng ăng ten cột tách biệt độ lợi cao hơn trạm động, khoảng 6db. Bộ phát trạm gốc sử dụng công nghệ VHF, UHF, nhảy tần ... , trong đó công nghệ UHF trải phổ (UHF spread spectrum) là phổ biến nhất.
Hầu hết thiết bị RTK GPS sử dụng tần số UHF 400-475 MHz hoặc VHF 170-220 MHz, liên lạc giọng nói khẩn cấp cũng sử dụng chung tần số này, đôi khi gây trục trặc. Ví thế nên máy RTK cho phép người sử dụng chọn dải tần số thích hợp. Tốc độ truyền dữ liệu giữa trạm tĩnh và trạm động khoảng 4600 bps.
Tiêu chuẩn RTCM
Đây là tiêu chuẩn quốc tế truyền dẫn dữ liệu DGNSS đưa ra bởi Ủy ban Kỹ thuật Vô tuyến dùng cho Dịch vụ hàng hải, nhóm làm việc 104. Đây là giao thức nhị phân tối ưu hóa truyền dẫn dữ liệu. Các tài liệu tiêu chuẩn DGNSS được liệt kê dưới đây:
| Tên tài liệu | Khuyến nghị | Phiên bản | Nội dung |
| Khuyến nghị tiêu chuẩn kỹ thuật định vị vi sai Differential GNSS (hệ thống định vị vệ tinh toàn cầu) | RTCM 10402.3 | 2.3 | Tiêu chuẩn hệ thống định vị vệ tinh toàn cầu vi sai, dùng cho trên biển và đất liền |
| Dịch vụ định vị vệ tinh toàn cầu vi sai (Differential GNSS) | RTCM 10403.1 | 3.1 | Phương pháp thay thế chính xác hơn RTCM 10402.3. |
| Tiêu chuẩn truyền tải kết nối RTCM qua Internet (Ntrip) | RTCM 10410.0 | 1 | Giao thức lớp ứng dụng hỗ trợ truyền GNSS qua Internet. |
| Tiêu chuẩn cho trạm tham chiếu GPS Navstar vi sai và giám sát toàn vẹn (RSIM) | RTCM 10401.2 | 2 | Đi cùng RTCM 10402.3, tiêu chuẩn này quy định thiết bị phát sóng hiệu chỉnh DGNSS. |
Tiêu chuẩn RTCM 10402.3 quy định các thông điệp hiệu chỉnh vi sai. Thông điệp từ 1-17 có trong phiên bản RTCM ban đầu, thông điệp 18-21 được bổ sung vào phiên bản 2.3, để tạo ra khả năng hiệu chỉnh RTK. RTCM phiên bản 3.0 và 3.1 tập trung vào việc tối ưu sử dụng băng thông, tính toàn vẹn cao và khả năng quản lý mạng RTK. Các thông điệp RTCM được miêu tả chi tiết trong tài liệu DGNSS.
Các tiêu chuẩn khác
Compact Measurement Record (CMR) được Trimbe phát triển và đưa ra sử dụng năm 1992. Định dạng cho phương pháp truyền và dữ liệu hiệu chỉnh pha sóng mang giữa trạm base và máy rover dùng trong RTK GPS khảo sát. Năm 2009, Trimble đưa ra CMRx, hỗ trợ sự thay đổi hệ thống GNSS. CMRx cải thiện thời gian khởi tạo, hỗ trợ khả năng bao phủ vệ tinh GNSS, xử lý tín hiệu GNSS mới, tăng cường hiệu suất sử dụng trong đô thị hoặc nơi bị che khuất như dưới cây ...
Tiêu chuẩn RTK khác được sử dụng rộng rãi ở châu Âu do công ty Septentrio đưa ra là FKP. Trong tiêu chuẩn RTCm 3.0 và 3.1, FKP sử dụng các trạm RTK base, phát sóng hiệu chỉnh lên tầng điện ly nên sử dụng được nhiều trạm base hơn. FKP sử dụng thông điệp độc quyền RTCM 59.
ISO 17123-8:2015 Thiết bị và dụng cụ quang học. Quy trình thử nghiệm thiết bị đo đạc và khảo sát. Phần 8 độ chính xác GNSS trong đo RTK
ISO 17123-8:2015 đưa ra quy trình áp dụng để đánh giá độ chính xác của GNSS (bao gồm GPS, GLONASS, GALILEO ...) khi sử dụng đo GNSS RTK và thiết bị phụ trợ đi kèm khi dùng trong xây dựng, khảo sát, đo công nghiệp. Cơ bản quy trình này dùng thử nghiệm tại hiện trường đối với ứng dụng cụ thể. Chúng không được dùng để đánh giá thử nghiệm toàn diện.